 Laird Connectivity is now Ezurio
Laird Connectivity is now Ezurio
All About Ultra-Wideband #1: How Is It So Accurate?
Ultra-Wideband (UWB) is a very unique wireless technology. In this series of posts we’re examining what differentiates it from the rest, starting with how it measures location so accurately.
Published on October 12, 2023
Old Dog, New Tricks: A Contender from the Days of Morse Code
Ultra-Wideband (UWB) technology’s reputation is beginning to precede it in many ways. While it’s been commonly available in the iPhone for over five years and has been in use in a few common customer applications like key fobs and the ubiquitous Apple AirTag, UWB is far from new. Its core technology has been in use for nearly 150 years, primarily in maritime communications and military applications, until research and a few key patents established it as viable for wireless networking in the 1990s. While it seems new and borderline futuristic in its applications today, it’s a mature technology that now enjoys adoption in the most popular smartphones and is seeing broadening horizons in terms of use cases.
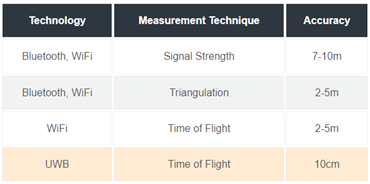
What’s so exciting about it, among other things, is how accurately it can be used to determine location between devices. Location and positioning without the aid of (for example) global positioning satellites is done with a number of very clever pulses and communications that help triangulate and calculate how far apart devices are. But previous implementations in other protocols have never had this level of accuracy. Bluetooth and Wi-Fi can determine location, but never to a degree of accuracy higher than a few meters. UWB can accomplish accuracy of around 10cm – a twenty-fold improvement at the least.
So the question is: how? What is it about UWB that creates this edge? As we’ll discuss in this post, it’s to do with a combination of measuring techniques that build out a very accurate picture of device location and relative position. Additionally, UWB does this in a way that is nondestructive to nearby wireless signals, which in terms of RF considerations is almost a freebie in terms of coexistence with other technologies.
Three Core Techniques that Make It All Work
The measurement techniques that UWB utilizes are not totally unique to UWB, and in fact are commonly used in previous locationing systems for Wi-Fi and Bluetooth. They are Time of Flight, Time Difference of Arrival, and Angle of Arrival. You can think of them as each adding a new layer of information on top of the last, until a clear and precise location can be constructed. Somewhat like the process of elimination, each technique tells us something about the relationship between the location of two devices until there are very few possible results, within a margin of error of 10cm.
- Time of Flight establishes the distance between two nodes by using a universal constant: The speed of light. Since radio waves travel at the speed of light, if you can send out a signal and wait for its echo, you can take the duration between the sending and the receiving, cut it in half, and calculate how far away something is. When two devices do this in tandem with each other, you can be even more certain of that result; the likelihood of one device receiving a scattered or otherwise inaccurate echo is possible, but both devices confirming the same increases the likelihood of correctness.
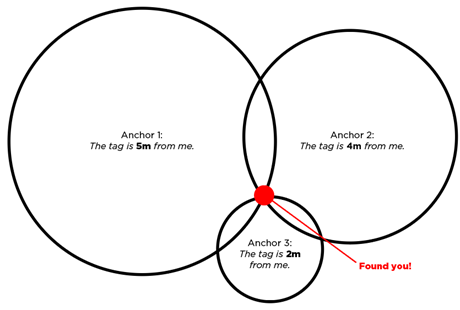
- Time Difference of Arrival adds additional devices’ intelligence into the mix. With UWB, there are two fundamental device types: Tags, which are mobile and whose location we want to receive, and anchors, whose location is fixed and known to the operator. When a tag communicates with more than one anchor, the differential in the distance between the tag and each of the anchors tells us how much closer the tag is to one anchor than the other. That limits, in terms of possibilities, the number of locations that tag can actually be. It must be at the intersection of these distances. With even one anchor, this information is useful, but it’s most precise with at least 3 anchors, in what we call triangulation. It’s shown here in 2D, but of course remember that this happens in 3D space.
- Angle of Arrival adds one final but very informative piece to this equation, which is to use two or more collocated antennas on one device (anchor or tag) and measure the very, very slight differences between the signal received at each. Those differences, while very small, can be used to determine the direction of the tag more accurately and to make inferences about the direction it’s heading as well. Two antennas in different locations, no matter how slight, will receive signal differently. That difference gives us the information we need to calculate an angle, relative to one device, where another device might be.
In summary, each of these components gives us more and more information that adds up to a very clear picture of location. Starting with approximate distance, then moving on to information from other devices to build out that picture, and finally estimating a precise angle, we build certainty that culminates in a very reliable determination.
Ultimately, UWB is expected to be used not alone but in conjunction with other technologies, like Wi-Fi and Bluetooth, which serve as a final check on this locationing and can prove to be a redundant check on the entire system – a final piece of the equation that acts as a check and validation for everything the UWB radio can determine. Because UWB has an extremely low signal level and very brief pulse, it can do this alongside Wi-Fi and Bluetooth without ever interfering with them. Not having to worry about coexistence makes UWB a perfect match for those incumbent technologies, and creates better location precision than was previously possible.
Coming up Next: How is Latency So Low?
Even though we’ve discussed the accuracy of location that UWB provides, there is a corollary that is just as important: The low latency of those measurements. Location accuracy after all is really only as “accurate” as it is current. UWB features extremely high refresh rates at its top end, but is configurable to higher latencies as well where it makes sense for a given application. Watch our blog for more on UWB at: www.lairdconnect.com/resources/blog
About Our UWB Modules
Our lineup of innovative new UWB modules seamlessly integrates cutting edge UWB silicon from NXP, with the processing and Bluetooth Low Energy (LE) capabilities of Nordic Semiconductor’s nRF52 SoC. The combination of the two enables significant advancements in granularity of location that improves existing Bluetooth LE beaconing and RSSI-based ranging. They’re optimised for battery-powered implementations and integrate additional memory, crystals and components to simplify your overall BOM and drive down the cost of integration.
This comprehensive hardware approach is complimented by a range of added value software, Python scripting capabilities, and cloud and mobile tools. Whether your application is hosted or hostless, we have options to suit your application’s needs, as well as your engineering team’s capabilities. All of this is then backed by our industry leading technical support, design services, and test services to to help you simply implement UWB in your next project.
Our innovative integration of the best wireless silicon from NXP and Nordic Semiconductor has produced the secure, flexible Sera NX040 range. The series features tightly integrated hardware and RF designs, all optimized for low power operation and reducing the need for external clocks, filters and components. Already using Bluetooth LE for basic beaconing or RSSI-based ranging? Now, easily advance to the next level with NFC and UWB for more granular locationing and positioning. This granularity yields much higher accuracy compared to RSSI-only proximity applications in industrial environments.
Learn more at: